- Allgemein
-
Bestellnummer D14002 Typcode CP-ASRS20-B-C11 Serie CP Systems Kategorien Logistik
- Beschreibung
-
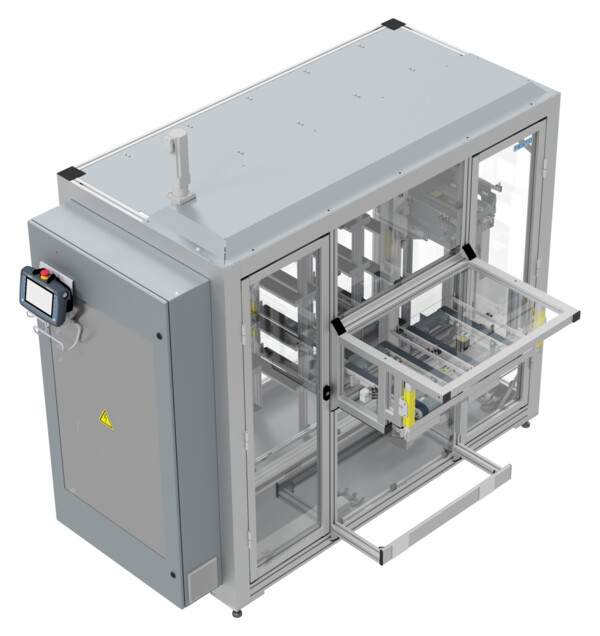
Das Lager dient der vollautomatischen Ein- und Auslagerung von Transportkisten. Die An- und Ablieferung der Kisten erfolgt typischerweise über Robotino. Zu diesem Zweck verfügt das Modul über eine Dockingvorrichtung. Innerhalb der Produktionsanlage agiert es als logistische Drehscheibe für alle Fertigteile, Halbzeuge und Baugruppen.
Bis zu 20 Kisten lassen sich in vier Regalzeilen mit je fünf Lagerplätzen einlagern. Ein 3-achsiger kartesischer Roboter übernimmt die Ein- und Auslagerung der Kisten.
Zur Identifikation der Kisten und deren Zuordnung zu Produktionsaufträgen sind diese mit RFID Tags ausgestattet.
-
Merkmal Wert Betriebsspannung 230 V AC, 50 Hz Maximale Stromaufnahme 3 A Betriebsdruck 6 bar, 90 psi Steuerung Siemens SIMATIC CPU 1512SP F-1PN Dezentrale Peripherie Siemens SIMATIC IM 155-6 PN HF HMI Siemens SIMATIC HMI KTP700F Mobile RFID Buskopf: Turck TBEN-S2-2RFID-4DXP
Schreib-/Lesekopf: 2x Turck TN-CK40-H11147Sicherheitslichtvorhang Keyence GL-R23F -
Integrierte SPS
Beschreibung Referenz Datentyp Addresse Eingänge Lichtvorhang - Fehlerausgang +CM1.T1-F2-KF5:15 Bool %I0.0 Lichtvorhang - Deaktivierungslampe +CM1.T1-F2-KF5:16 Bool %I0.1 X-Achse - Betriebsbereit +CM1.T1-QA1:X_BB Bool %I0.2 X-Achse - Bewegung beendet +CM1.T1-QA1:X_MC Bool %I0.3 Z-Achse - Betriebsbereit +CM1.T1-QA1:Z_BB Bool %I0.4 X-Achse - Schleichgang aktiv +CM1.T1-FZ11:5 Bool %I0.5 Z-Achse - Schleichgang aktiv +CM1.T1-FZ21:5 Bool %I0.6 Z-Achse - Bewegung beendet +CM1.T1-QA1:Z_MC Bool %I0.7 Eingangsband - Äußeres Ende belegt +CM1.M4-BG61 Bool %I1.0 Eingangsband - Mitte belegt +CM1.M4-BG62 Bool %I1.1 Eingangsband - Inneres Ende belegt +CM1.M4-BG63 Bool %I1.2 Eingangsband - Robotino Koppelsensor (TRUE = Robotino bereit) +CM1.M4-BG64 Bool %I1.3 Ausgabeband - Äußeres Bandende belegt +CM1.M4-BG65 Bool %I1.4 Ausgabeband - Mitte belegt +CM1.M4-BG66 Bool %I1.5 Ausgabeband - Inneres Ende belegt +CM1.M4-BG67 Bool %I1.6 Ausgabeband - Robotino Koppelsensor (TRUE = Robotino bereit) +CM1.M4-BG68 Bool %I1.7 Schutztüren hinten geschlossen (Kanal 1) +CM1.T1-FQ2:12 Bool %I10.0 Schutztür 1 hinten verriegelt +CM1.T1-FQ1:42 Bool %I10.1 Schutztüren vorne geschlossen (Kanal 1) +CM1.T1-FQ4:1 Bool %I10.2 Schutztüren hinten geschlossen (Kanal 2) +CM1.T1-FQ2:22 Bool %I10.4 Schutztür 2 hinten verriegelt +CM1.T1-FQ2:42 Bool %I10.5 Schutztüren vorne geschlossen (Kanal 2) +CM1.T1-FQ4:3 Bool %I10.6 Not-Halt Schlagschalter gedrückt (Kanal 1) +CM1.U1-FQ0 Bool %I20.0 Betriebsartenschalter auf Automatik +CM1.U1-SF4 Bool %I20.1 Taster Antriebe ein gedrückt +CM1.U1-SF1 Bool %I20.2 Lichtvorhang geschlossen (Kanal 1) +CM1.T1-F2-KF5:2 Bool %I20.3 Not-Halt Schlagschalter gedrückt (Kanal 2) +CM1.U1-FQ0 Bool %I20.4 Betriebsartenschalter auf Manuell +CM1.U1-SF4 Bool %I20.5 Not-Halt freigegeben +CM1.T1-FZ1 Bool %I20.6 Lichtvorhang geschlossen (Kanal 2) +CM1.T1-F2-KF5:4 Bool %I20.7 Lagerspalte 1 frei +CM1.C1-BG51 Bool %I30.0 Lagerspalte 2 frei +CM1.C1-BG52 Bool %I30.1 Lagerspalte 3 frei +CM1.C1-BG53 Bool %I30.2 Lagerspalte 4 frei +CM1.C1-BG54 Bool %I30.3 Teleskop - Grundstellung +CM1.M3-BG31 Bool %I40.0 Teleskop - In Lagerfach ausgefahren +CM1.M3-BG32 Bool %I40.1 Kiste im Lagerfach vorhanden +CM1.M3-BG33 Bool %I40.2 Teleskop - Stopper ausgefahren +CM1.M3-BG34 Bool %I40.3 Teleskop - Ende zum Docking belegt +CM1.M3-BG35 Bool %I40.4 Teleskop - Kiste vorhanden +CM1.M3-BG36 Bool %I40.5 Teleskop - Ende zum Lager belegt +CM1.M3-BG37 Bool %I40.6 Z-Achse - Indexposition erreicht +CM1.M3-BG38 Bool %I40.7 Ausgänge Teleskop - In Lagerfach ausfahren +CM1.M3-MB32 Bool %Q0.0 Teleskop - Stopper einziehen +CM1.M3-MB34 Bool %Q0.1 X-Achse - Freigabe +CM1.M1-QA11:X_EF Bool %Q0.2 Z-Achse - Freigabe +CM1.M1-QA11:Z_EF Bool %Q0.3 Teleskop - Band in Richtung Lager fahren +CM1.T1-QA1:re Bool %Q0.4 Teleskop - Band in Richtung Docking fahren +CM1.T1-QA1:li Bool %Q0.5 Schutztüren hinten verriegeln +CM1.T1-FQ1:E1 Bool %Q0.6 Eingangsband - In Richtung Teleskop fahren +CM1.T1-QA2:re Bool %Q1.0 Eingangsband - In Richtun Robotino fahren +CM1.T1-QA2:li Bool %Q1.1 Lichtvorhang - Deaktivierungseingang 1 +CM1.T1-F2-KF5:17 Bool %Q1.2 Eingangsband - Robotino Koppeltransmitter (TRUE = Station bereit) +CM1.T1-QA2:re Bool %Q1.3 Ausgabeband - In Richtung Teleskop fahren +CM1.T1-QA3:re Bool %Q1.4 Ausgabeband - In Richtun Robotino fahren +CM1.T1-QA3:li Bool %Q1.5 Lichtvorhang - Deaktivierungseingang 2 +CM1.T1-F2-KF5:18 Bool %Q1.6 Ausgabeband - Robotino Koppeltransmitter (TRUE = Station bereit) +CM1.T1-QA3:li Bool %Q1.7 X-/Z-Achse - Schleichgang aktivieren Bool %Q50.0 X/Z-Achse - Eilgang aktivieren Bool %Q50.1 Not-Halt resetten Bool %Q50.2 Not-Halt Freigabe Bool %Q50.3 -
-
-
-



