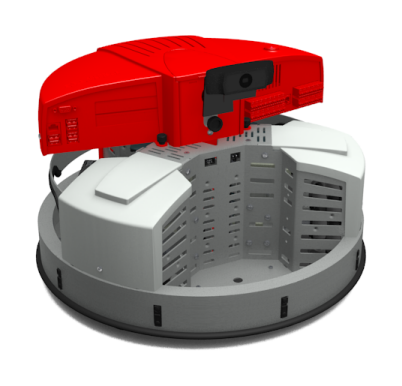
一个全向驱动装置使Robotino能够在平面上完整地全方位移动,而多种接口确保了与Robotino之间的连接,通过传感器,电机和周遭环境的回馈数据将根据工业要求传回控制系统。
控制
Robotino闭环控制的控制中心。
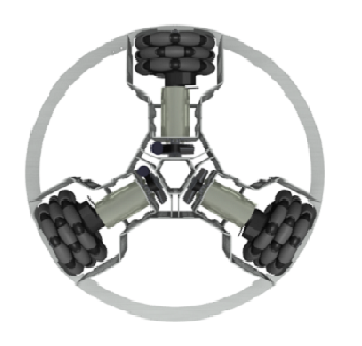
驱动系统
根据所要求的精确度实现移动和调整过程。
传感器
识别周遭环境中的物体以便导航与绕开障碍物。
接口
使子系统间耦合以便信息交互。
电压供应
关于电池及充电设备的信息。