- Allgemein
-
Bestellnummer D13018 Typcode CP-AM-OUT Serie CP Systems Kategorien Applikationsmodul
- Beschreibung
-
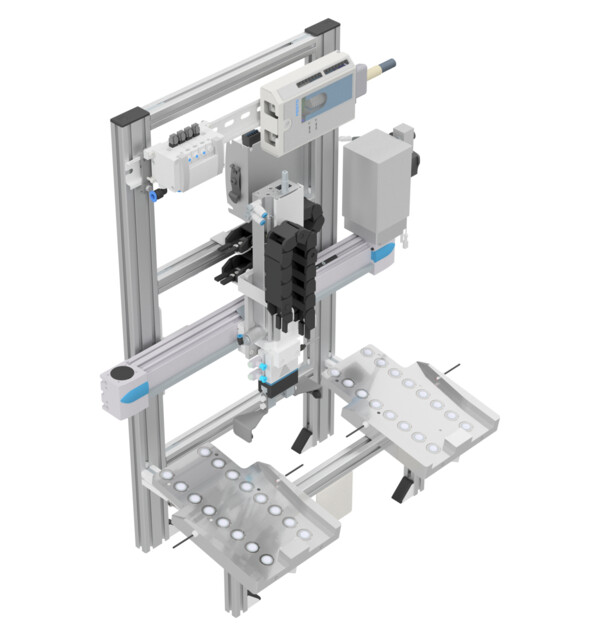
Das Applikationsmodul Werkstückausgabe ist mit einem zweiachsigen Handhabungssystem ausgestattet und dient der Ausgabe von Werkstücken auf zwei Rollenbahnen. Das Applikationsmodul Werkstückausgabe kann als Handarbeitsplatz für die Warenentnahme eingesetzt werden.
-
Merkmal Wert Elektrischer Anschluss 24-polige IEEE 488 Buchse (SysLink) Pneumatischer Anschluss Schlauch mit 4 mm Außendurchmesser Betriebsspannung 24 V DC Betriebsdruck 6 bar E/A 8 DI / 8 DO X-Achse Schrittmotor
Separater MotorcontrollerZ-Achse Pneumatisch Parallelgreifer Pneumatisch Maße (H x B x T) 600 mm x 460 mm x 300 mm -
Schnittstelle Applikationsmodul (Syslink oder Analog-Terminal)
Beschreibung Referenz Datentyp Addresse
CP LabAddresse
CP FactoryEingänge TRUE = Z-Achse in oberer Endlage +GM-BG1 Bool %I0.0 %I2.0 TRUE = Z-Achse in unterer Endlage +GM-BG2 Bool %I0.1 %I2.1 TRUE = Greifer offen +GM-BG3 Bool %I0.2 %I2.2 TRUE = Ablegeplatz links belegt +GM-BG4 Bool %I0.3 %I2.3 TRUE = Ablegeplatz rechts belegt +GM-BG5 Bool %I0.4 %I2.4 TRUE = X-Achse referenziert +GM-KF1-X1:20 Bool %I0.5 %I2.5 TRUE = X-Achse Positionierung abgeschlossen +GM-KF1-X1:12 Bool %I0.6 %I2.6 TRUE = X-Achse Controller bereit +GM-KF1-X1:21 Bool %I0.7 %I2.7 Ausgänge TRUE = Z-Achse nach oben bewegen +GM-MB1 Bool %Q0.0 %Q2.0 TRUE = Z-Achse nach unten bewegen +GM-MB2 Bool %Q0.1 %Q2.1 TRUE = Endlagenverriegelung der Z-Achse öffnen +GM-MB3 Bool %Q0.2 %Q2.2 TRUE = Greifer öffnen +GM-MB4 Bool %Q0.3 %Q2.3 TRUE = X-Achse Reglerfreigabe +GM-KF1-X1:10 Bool %Q0.4 %Q2.4 X-Achse Verfahrsatzauswahl Bit 0 (0 = Referenzieren, 1 = Linke Ablegeposition, 2 = Rechte Ablegeposition, 3 = Aufnahmeposition) +GM-KF1-X1:1 Bool %Q0.5 %Q2.5 X-Achse Verfahrsatzauswahl Bit 1 (0 = Referenzieren, 1 = Linke Ablegeposition, 2 = Rechte Ablegeposition, 3 = Aufnahmeposition) +GM-KF1-X1:2 Bool %Q0.6 %Q2.6 TRUE = X-Achse Positionierung starten +GM-KF1-X1:6 Bool %Q0.7 %Q2.7 -
-





