- General
-
Order number D13018 Type code CP-AM-OUT Series CP Systems Categories Application module
- Description
-
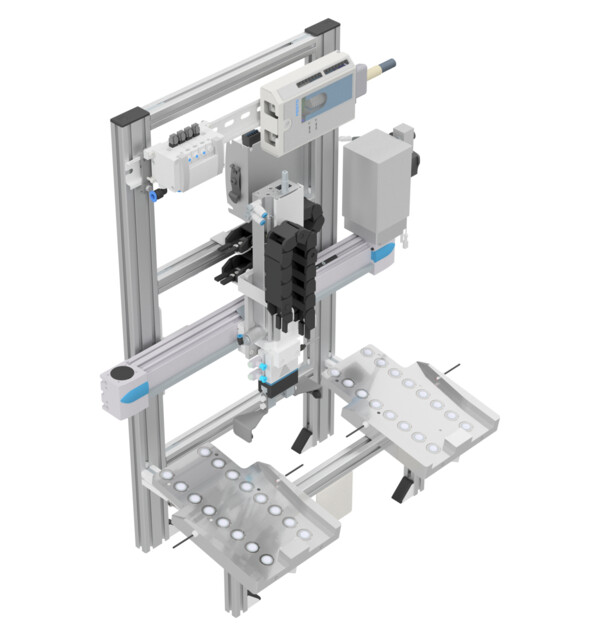
The application module Work piece output is equipped with a two-axis handling system and is used to output cubic work pieces on two roller slides. The application module work piece output can be used as a manual workplace for retrieving work pieces.
-
Attribute Value Electrical connection 24-pin IEEE 488 female (SysLink) Pneumatic connection Tube with 4 mm outer diameter Operating voltage 24 VDC Operating pressure 6 bar I/O 8 DI / 8 DO X-axis Step motor
Separate motor controllerZ-axis Pneumatic Parallel gripper Pneumatic Dimenions (H x W x D) 600 mm x 460 mm x 300 mm -
Application module interface (Syslink or analog terminal)
Description Reference Datatype Address
CP LabAddress
CP FactoryInputs TRUE = Z-axis in upper end position +GM-BG1 Bool %I0.0 %I2.0 TRUE = Z-axis in lower end position +GM-BG2 Bool %I0.1 %I2.1 TRUE = Gripper open +GM-BG3 Bool %I0.2 %I2.2 TRUE = Left drop-off position occupied +GM-BG4 Bool %I0.3 %I2.3 TRUE = Right drop-off position occupied +GM-BG5 Bool %I0.4 %I2.4 TRUE = X-axis referenced +GM-KF1-X1:20 Bool %I0.5 %I2.5 TRUE = X-axis target position reached +GM-KF1-X1:12 Bool %I0.6 %I2.6 TRUE = X-axis controller ready +GM-KF1-X1:21 Bool %I0.7 %I2.7 Outputs TRUE = Move Z-axis up +GM-MB1 Bool %Q0.0 %Q2.0 TRUE = Move Z-axis down +GM-MB2 Bool %Q0.1 %Q2.1 TRUE = Open Z-axis end position lock +GM-MB3 Bool %Q0.2 %Q2.2 TRUE = Open gripper +GM-MB4 Bool %Q0.3 %Q2.3 TRUE = Enable X-axis controller +GM-KF1-X1:10 Bool %Q0.4 %Q2.4 X-axis motion record selection bit 0 (0 = reference, 1 = left drop-off position, 2 = right drop-off position, 3 = pick-up position) +GM-KF1-X1:1 Bool %Q0.5 %Q2.5 X-axis motion record selection bit 1 (0 = reference, 1 = left drop-off position, 2 = right drop-off position, 3 = pick-up position) +GM-KF1-X1:2 Bool %Q0.6 %Q2.6 TRUE = Start X-axis motion +GM-KF1-X1:6 Bool %Q0.7 %Q2.7 -
-
-
-



