- Allgemein
-
Bestellnummer D12004 Typcode CP-F-BRANCH Serie CP Systems Unterserie CP Factory Kategorien Grundmodul, Logistik
- Beschreibung
-
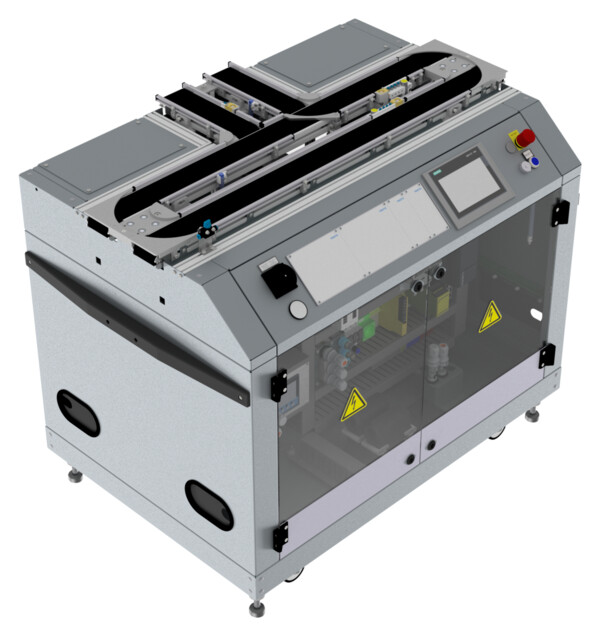
Dieses Grundmodul dient dazu, den Materialfluss in einem CP Factory System mit einer automatisierten Abzweigung zu spalten bzw. zusammenzuführen. Es stellt außerdem eine Arbeitsposition für Applikationsmodule bereit.
Das Grundmodul Weiche ist mit einer SPS und allen nötigen Schnittstellen ausgestattet, um durch Applikationsmodule ergänzt zu werden und mit MES4 zu kommunizieren.
-
Merkmal Wert Montagepunkte für Applikationsmodule 1 Elektrischer Anschluss CEE (16 A) bei Anschluss an Rauminfrastruktur
Vorkonfektionierter Modularstecker bei Anschluss an anderer CP Factory StationPneumatischer Anschluss Schnellkupplung bei Anschluss an Rauminfrastruktur
Vorkonfektionierter Modularstecker bei Anschluss an anderer CP Factory StationBetriebsspannung 400 V AC Betriebsdruck 6 bar Steuerung Siemens CPU 1512SP HMI Siemens Simatic TP700 Comfort E/A des Grundmoduls 23 DI / 18 DO onboard 2x Stoppereinheit Pneumatischer Stopperzylinder mit einem Endlagensensor
4x Warenträgerdetektion & -identifikation: induktiv
RFID Schreib-/LesekopfBandantrieb 24 V DC Motor
Rechts-/Linkslaufsteuerung mit SchleichgangRFID Turk BLCEN-2M12MT-2RFID-A Busknoten mit 2 Schreib-Leseköpfen Weiche Pneumatischer Rotationszylinder mit zwei Endlagensensoren Weitere Sensorik 4x Warenträgerdetektion: Reflexlichttaster
Sensoren zur Kollisionsvermeidung im AbzweigungsbereichMaße (H x B x T) 980 mm x 1200 mm x 800 mm -
Integrierte SPS
Beschreibung Referenz Datentyp Addresse Eingänge FALSE = Not-Halt nicht freigegeben +K1-F2-KF1 Bool %I0.0 TRUE = Not-Halt-Schlagtaster gedrückt +S1-F2-FQ1 Bool %I0.3 TRUE = Stopperzylinder (Weiche) in unterer Endlage +G1-BG20 Bool %I1.0 TRUE = Warenträger in Stopperposition (Weiche) erkannt / Stopper (Weiche) Warenträger Identcode Bit 0 erkannt +G1-BG21 Bool %I1.1 TRUE = Stopper (Weiche) Warenträger Identcode Bit 1 erkannt +G1-BG22 Bool %I1.2 TRUE = Stopper (Weiche) Warenträger Identcode Bit 2 erkannt +G1-BG23 Bool %I1.3 TRUE = Stopper (Weiche) Warenträger Identcode Bit 3 erkannt +G1-BG24 Bool %I1.4 TRUE = Warenträger an Bandanfang (Band 2) erkannt +G1-BG26 Bool %I1.6 TRUE = Warenträger an Bandende (Band 2) erkannt +G1-BG27 Bool %I1.7 TRUE = Weiche geschlossen (Warenträger bleiben auf Band 2) +G1-BG30 Bool %I3.0 TRUE = Weiche geöffnet (Warenträger zweigen zu Band 3 ab) +G1-BG31 Bool %I3.1 Nur mit Robotino Docking-Kit: TRUE = Koppelsignal von Robotino empfangen +G1-KG35 Bool %I3.5 TRUE = Stopperzylinder (Band 4) in unterer Endlage +G1-BG40 Bool %I4.0 TRUE = Warenträger in Stopperposition (Band 4) erkannt +G1-BG41 Bool %I4.1 TRUE = Warenträger hat kritische Sektion über Band 3 verlassen +G1-BG42 Bool %I4.2 TRUE = Warenträger hat kritische Sektion über Band 2 verlassen +G1-BG45 Bool %I4.5 TRUE = Stopperzylinder (Band 1) in unterer Endlage +G1-BG50 Bool %I5.0 TRUE = Warenträger in Stopperposition (Band 1) erkannt / Stopper (Band 1) Warenträger Identcode Bit 0 erkannt +G1-BG51 Bool %I5.1 TRUE = Stopper (Band 1) Warenträger Identcode Bit 1 erkannt +G1-BG52 Bool %I5.2 TRUE = Stopper (Band 1) Warenträger Identcode Bit 2 erkannt +G1-BG53 Bool %I5.3 TRUE = Stopper (Band 1) Warenträger Identcode Bit 3 erkannt +G1-BG54 Bool %I5.4 TRUE = Warenträger an Bandanfang (Band 1) erkannt +G1-BG56 Bool %I5.6 TRUE = Warenträger an Bandende (Band 1) erkannt +G1-BG57 Bool %I5.7 Ausgänge TRUE = Band 1 Vorwärtslauf einschalten +K1-QA1:A1 Bool %Q0.0 TRUE = Band 1 Rückwärtslauf einschalten +K1-QA1:A2 Bool %Q0.1 Band 1 Geschwindigkeit wählen (FALSE = normal, TRUE = langsam) +K1-QA1:A3 Bool %Q0.2 TRUE = Band 2 Vorwärtslauf einschalten +K1-QA2:A1 Bool %Q0.3 TRUE = Band 2 Rückwärtslauf einschalten +K1-QA2:A2 Bool %Q0.4 Band 2 Geschwindigkeit wählen (FALSE = normal, TRUE = langsam) +K1-QA2:A3 Bool %Q0.5 TRUE = Band 3 Vorwärtslauf einschalten +K1-QA3:A1 Bool %Q0.6 TRUE = Band 3 Rückwärtslauf einschalten +K1-QA3:A2 Bool %Q0.7 TRUE = Stopperzylinder (Weiche) nach unten bewegen +G1-MB20 Bool %Q1.0 Band 3 Geschwindigkeit wählen (FALSE = normal, TRUE = langsam) +K1-QA3:A3 Bool %Q1.3 TRUE = Band 4 Vorwärtslauf einschalten +K1-QA4:A1 Bool %Q1.5 TRUE = Band 4 Rückwärtslauf einschalten +K1-QA4:A2 Bool %Q1.6 Band 4 Geschwindigkeit wählen (FALSE = normal, TRUE = langsam) +K1-QA4:A3 Bool %Q1.7 TRUE = Weiche schließen (Warenträger auf Band 2 lassen) +G1-MB30 Bool %Q3.0 TRUE = Weiche öffnen (Warenträger zu Band 3 abzweigen) +G1-MB31 Bool %Q3.1 Nur mit Robotino Docking-Kit: TRUE = Koppelsignal zu Robotino einschalten +G1-GF35 Bool %Q3.5 TRUE = Stopperzylinder (Band 4) nach unten bewegen +G1-MB40 Bool %Q4.0 TRUE = Stopperzylinder (Band 1) nach unten bewegen +G1-MB50 Bool %Q5.0 -
-
-
-



