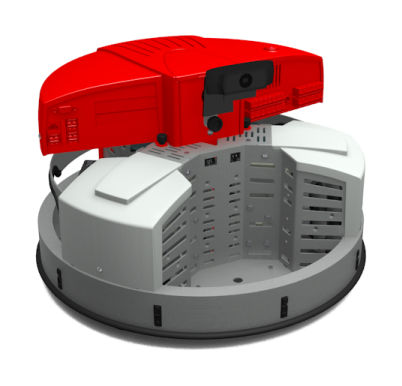
Ein integriertes Robotersystem
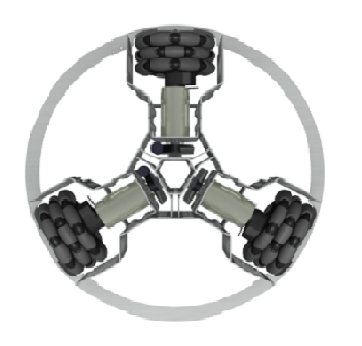
Durch einen omnidirektionalen Antrieb kann sich Robotino in der Ebene holonom bewegen. Eine Vielzahl von Schnittstellen stehen zur Verfügung um eine Verbindung zu Robotino aufzubauen. Über Sensoren werden Rückgabedaten aus Motoren und Umfeld für die Regelung industriegerecht zurück an die Steuerung übertragen.