- General
-
Order number D12004 Type code CP-F-BRANCH Series CP Systems Sub series CP Factory Categories Base module, Logistics
- Description
-
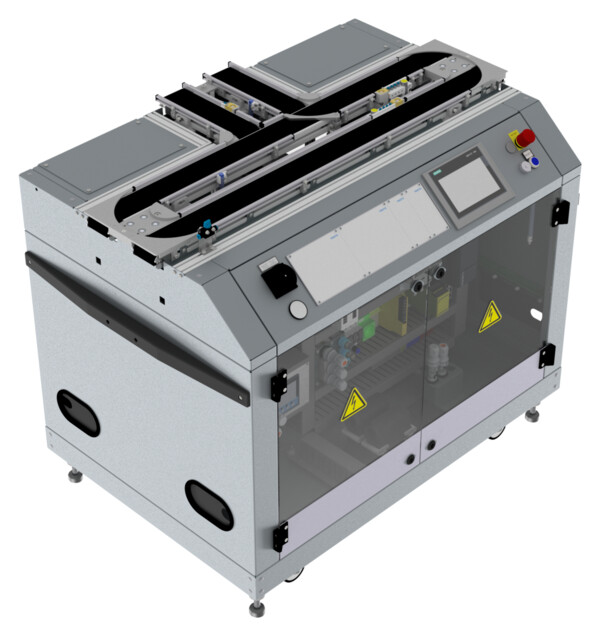
This base module can automatically branch off material flow in a CP factory system. It also provides a single work position for application modules.
The base module Branch comes with a PLC and all interfaces for working with any application module and MES4.
-
Attribute Value Mounting positions for application modules 1 Electrical connection CEE (16 A) for connecting to room infrastructure
Preconfigured modular plug for connecting to another CP Factory stationPneumatic connection Hose coupling for connecting to room infrastructure
Preconfigured modular plug for connecting to another CP Factory stationOperating voltage 400 VAC Operating pressure 6 bar Controller Siemens CPU 1512SP HMI Siemens Simatic TP700 Comfort I/O for base module 23 DI / 18 DO onboard 2x Stopper unit Pneumatic stopper cylinder with one end-position sensor
4x carrier detection & identification: inductive
RFID Read-Write-HeadBelt drive 24 VDC motor
bi-directional controller with slow and high speedRFID Turk BLCEN-2M12MT-2RFID-A bus node with 2 read-write-heads Junction Pneumatic rotary cylinder with two end-position sensors Other sensors 4x carrier detection: optoelectrical
Sensors for collision avoidance inside branch areaDimenions (H x W x D) 980 mm x 1200 mm x 800 mm -
Integrated PLC
Description Reference Datatype Address Inputs FALSE = Emergency stop not acknowledged +K1-F2-KF1 Bool %I0.0 TRUE = Emergency stop button pushed +S1-F2-FQ1 Bool %I0.3 TRUE = Stopper cylinder (branch) in lower end position +G1-BG20 Bool %I1.0 TRUE = Carrier detected at stopper (branch) / Stopper (branch) carrier ident code bit 0 detected +G1-BG21 Bool %I1.1 TRUE = Stopper (branch) carrier ident code bit 1 detected +G1-BG22 Bool %I1.2 TRUE = Stopper (branch) carrier ident code bit 2 detected +G1-BG23 Bool %I1.3 TRUE = Stopper (branch) carrier ident code bit 3 detected +G1-BG24 Bool %I1.4 TRUE = Carrier detected at conveyor entry (belt 2) +G1-BG26 Bool %I1.6 TRUE = Carrier detected at conveyor exit (belt 2) +G1-BG27 Bool %I1.7 TRUE = Deflector arm closed (carrier continues straight on belt 2) +G1-BG30 Bool %I3.0 TRUE = Deflector arm opened (carrier gets diverted to belt 3) +G1-BG31 Bool %I3.1 Only with Robotino Docking-Kit: TRUE = Coupling signal from Robotino received +G1-KG35 Bool %I3.5 TRUE = Stopper cylinder (belt 4) in lower end position +G1-BG40 Bool %I4.0 TRUE = Carrier detected at stopper (belt 4) +G1-BG41 Bool %I4.1 TRUE = Carrier has left critical section via belt 3 +G1-BG42 Bool %I4.2 TRUE = Carrier has left critical section via belt 2 +G1-BG45 Bool %I4.5 TRUE = Stopper cylinder (belt 1) in lower end position +G1-BG50 Bool %I5.0 TRUE = Carrier detected at stopper (belt 1) / Stopper (belt 1) carrier ident code bit 0 detected +G1-BG51 Bool %I5.1 TRUE = Stopper (belt 1) carrier ident code bit 1 detected +G1-BG52 Bool %I5.2 TRUE = Stopper (belt 1) carrier ident code bit 2 detected +G1-BG53 Bool %I5.3 TRUE = Stopper (belt 1) carrier ident code bit 3 detected +G1-BG54 Bool %I5.4 TRUE = Carrier detected at conveyor entry (belt 1) +G1-BG56 Bool %I5.6 TRUE = Carrier detected at conveyor exit (belt 1) +G1-BG57 Bool %I5.7 Outputs TRUE = Drive belt 1 in forward direction +K1-QA1:A1 Bool %Q0.0 TRUE = Drive belt 1 in reverse direction +K1-QA1:A2 Bool %Q0.1 Select belt 1 speed (FALSE = normal, TRUE = slow) +K1-QA1:A3 Bool %Q0.2 TRUE = Drive belt 2 in forward direction +K1-QA2:A1 Bool %Q0.3 TRUE = Drive belt 2 in reverse direction +K1-QA2:A2 Bool %Q0.4 Select belt 2 speed (FALSE = normal, TRUE = slow) +K1-QA2:A3 Bool %Q0.5 TRUE = Drive belt 3 in forward direction +K1-QA3:A1 Bool %Q0.6 TRUE = Drive belt 3 in reverse direction +K1-QA3:A2 Bool %Q0.7 TRUE = Move stopper cylinder (branch) down +G1-MB20 Bool %Q1.0 Select belt 3 speed (FALSE = normal, TRUE = slow) +K1-QA3:A3 Bool %Q1.3 TRUE = Drive belt 4 in forward direction +K1-QA4:A1 Bool %Q1.5 TRUE = Drive belt 4 in reverse direction +K1-QA4:A2 Bool %Q1.6 Select belt 4 speed (FALSE = normal, TRUE = slow) +K1-QA4:A3 Bool %Q1.7 TRUE = Close deflector arm (let carrier continue straight on belt 2) +G1-MB30 Bool %Q3.0 TRUE = Open deflector arm (divert carrier to belt 3) +G1-MB31 Bool %Q3.1 Only with Robotino Docking-Kit: TRUE = Switch on coupling signal to Robotino +G1-GF35 Bool %Q3.5 TRUE = Move stopper cylinder (belt 4) down +G1-MB40 Bool %Q4.0 TRUE = Move stopper cylinder (belt 1) down +G1-MB50 Bool %Q5.0 -
-
-
-





