- General
-
Order number D14002 Type code CP-ASRS20-B-C11 Series CP Systems Categories Logistics
- Description
-
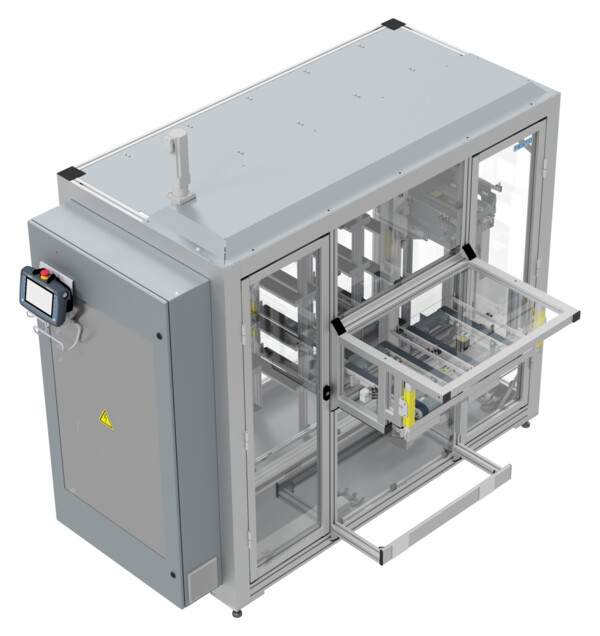
The storage serves to automatically store and retrieve transport boxes. The delivery and pick-up of boxes is typically done by Robotino. For this reason, the module is equipped with a docking interface. It acts as a logistics hub for all finished parts, semi-finished products and assemblies within the production system.
Up to 20 boxes can be stored in four rows of shelves with five storage spaces each. A 3-axis Cartesian robot performs the box handling.
For identification and allocation to production orders, each box is outfitted with an RFID tag.
-
Attribute Value Operating voltage 230 V AC, 50 Hz Maximum current 3 A Operating pressure 6 bar, 90 psi Controller Siemens SIMATIC CPU 1512SP F-1PN Decentralized periphery Siemens SIMATIC IM 155-6 PN HF HMI Siemens SIMATIC HMI KTP700F Mobile RFID Bus head: Turck TBEN-S2-2RFID-4DXP
Read/write head: 2x Turck TN-CK40-H11147Safety light curtain 4x Keyence GL-R23F -
Integrated PLC
Description Reference Datatype Address Inputs Light curtain - Error output +CM1.T1-F2-KF5:15 Bool %I0.0 Light curtain - Muting lamp output +CM1.T1-F2-KF5:16 Bool %I0.1 X-axis - Ready +CM1.T1-QA1:X_BB Bool %I0.2 X-axis - Motion complete +CM1.T1-QA1:X_MC Bool %I0.3 Z-axis - Motion complete +CM1.T1-QA1:Z_BB Bool %I0.4 X-axis - Reduced speed enabled +CM1.T1-FZ11:5 Bool %I0.5 Z-axis - Reduced speed enabled +CM1.T1-FZ21:5 Bool %I0.6 Z-axis - Motion complete +CM1.T1-QA1:Z_MC Bool %I0.7 Input belt - Outer end occupied +CM1.M4-BG61 Bool %I1.0 Input belt - Middle occupied +CM1.M4-BG62 Bool %I1.1 Input belt - Inner end occupied +CM1.M4-BG63 Bool %I1.2 Input belt - Robotino coupling sensor (TRUE = Robotino ready) +CM1.M4-BG64 Bool %I1.3 Output belt - Outer end occupied +CM1.M4-BG65 Bool %I1.4 Output belt - Middle occupied +CM1.M4-BG66 Bool %I1.5 Output belt - Inner end occupied +CM1.M4-BG67 Bool %I1.6 Output belt - Robotino coupling sensor (TRUE = Robotino ready) +CM1.M4-BG68 Bool %I1.7 Rear safety doors closed (Channel 1) +CM1.T1-FQ2:12 Bool %I10.0 Rear safety door 1 locked +CM1.T1-FQ1:42 Bool %I10.1 Front safety doors closed (Channel 1) +CM1.T1-FQ4:1 Bool %I10.2 Rear safety doors closed (Channel 2) +CM1.T1-FQ2:22 Bool %I10.4 Rear safety door 2 locked +CM1.T1-FQ2:42 Bool %I10.5 Front safety doors closed (Channel 2) +CM1.T1-FQ4:3 Bool %I10.6 Emergency stop switch pressed (Channel 1) +CM1.U1-FQ0 Bool %I20.0 Operation mode switch on automatic +CM1.U1-SF4 Bool %I20.1 Drives on button pressed +CM1.U1-SF1 Bool %I20.2 Light curtain closed (Channel 1) +CM1.T1-F2-KF5:2 Bool %I20.3 Emergency stop switch pressed (Channel 2) +CM1.U1-FQ0 Bool %I20.4 Operation mode switch on manual +CM1.U1-SF4 Bool %I20.5 Emergency stop released +CM1.T1-FZ1 Bool %I20.6 Light curtain closed (Channel 2) +CM1.T1-F2-KF5:4 Bool %I20.7 Storage column 1 free +CM1.C1-BG51 Bool %I30.0 Storage column 2 free +CM1.C1-BG52 Bool %I30.1 Storage column 3 free +CM1.C1-BG53 Bool %I30.2 Storage column 4 free +CM1.C1-BG54 Bool %I30.3 Telescope - Initial position +CM1.M3-BG31 Bool %I40.0 Telescope - Extended into storage bay +CM1.M3-BG32 Bool %I40.1 Box present in storage bay +CM1.M3-BG33 Bool %I40.2 Telescope - Stopper extended +CM1.M3-BG34 Bool %I40.3 Telescope - End towards docking occupied +CM1.M3-BG35 Bool %I40.4 Telescope - Box present +CM1.M3-BG36 Bool %I40.5 Telescope - End towards storage occupied +CM1.M3-BG37 Bool %I40.6 Z-axis - Indexed position reached +CM1.M3-BG38 Bool %I40.7 Outputs Telescope - Extend into storage bay +CM1.M3-MB32 Bool %Q0.0 Telescope - Retract stopper +CM1.M3-MB34 Bool %Q0.1 X-axis - Enable +CM1.M1-QA11:X_EF Bool %Q0.2 Z-axis - Enable +CM1.M1-QA11:Z_EF Bool %Q0.3 Telescope - Run belt towards storage bay +CM1.T1-QA1:re Bool %Q0.4 Telescope - Run belt towards docking +CM1.T1-QA1:li Bool %Q0.5 Lock rear safety doors +CM1.T1-FQ1:E1 Bool %Q0.6 Input belt - Run towards telescope +CM1.T1-QA2:re Bool %Q1.0 Input belt - Run towards Robotino +CM1.T1-QA2:li Bool %Q1.1 Light curtain - Muting input 1 +CM1.T1-F2-KF5:17 Bool %Q1.2 Input belt - Robotino coupling transmitter (TRUE = Station ready) +CM1.T1-QA2:re Bool %Q1.3 Output belt - Run towards telescope +CM1.T1-QA3:re Bool %Q1.4 Output belt - Run towards Robotino +CM1.T1-QA3:li Bool %Q1.5 Light curtain - Muting input 2 +CM1.T1-F2-KF5:18 Bool %Q1.6 Output belt - Robotino coupling transmitter (TRUE = Station ready) +CM1.T1-QA3:li Bool %Q1.7 X/Z-axis - Enable reduced speed Bool %Q50.0 X/Z-axis - Enable rapid speed Bool %Q50.1 Reset emergency stop Bool %Q50.2 Emergency stop release Bool %Q50.3 -
-
-
-





